


裝盒機技術(shù)
新聞資訊
取盒機構(gòu)對裝盒機生產(chǎn)線的生產(chǎn)效率起著決定性作用,因此設計出合理的取盒機構(gòu)對裝盒包裝行業(yè)有著非常重要的意義。根據(jù)廠家的要求,結(jié)合空間連桿機構(gòu)的相關 設計思想設計出能實現(xiàn)取盒動作的空間連桿機構(gòu),并利用軌跡反求法對五桿機構(gòu)的位置進行分析。根據(jù)各連桿長度不變的條件,建立桿軸構(gòu)件的空間運動參數(shù)方程。 應用Solid Works建模,模擬機構(gòu)的運行動態(tài)過程。該機構(gòu)現(xiàn)己投入生產(chǎn),經(jīng)過實踐論證,結(jié)構(gòu)合理。
取盒機構(gòu)是裝盒機生產(chǎn)線上的一個獨立模塊機構(gòu),現(xiàn)設計一種上開蓋取盒機構(gòu)。此機構(gòu)的特點主要在于其控制方式的選擇,相比行星輪控制,其運行精度和穩(wěn)定性更高,相比凸輪控制,其適用范圍更寬、適于系列產(chǎn)品的靈活度更高。
裝盒機取盒機構(gòu)采用空間連桿機構(gòu)取盒,由吸盒一送盒一放盒3個動作組成,整個過程通過主軸的轉(zhuǎn)動和空間曲柄搖桿的擺動進行復合控制實現(xiàn);根據(jù)實際的 取盒動作的空間位置,確定主軸的擺動幅度和空間曲柄搖桿的擺動幅度以及確定二者的相互運動配合關系及各個運動的時間差度關系是實現(xiàn)此機構(gòu)設計的關鍵;空間 曲柄搖桿機構(gòu)的實時位姿及其安裝位置的確定也是此次設計的關鍵問題。
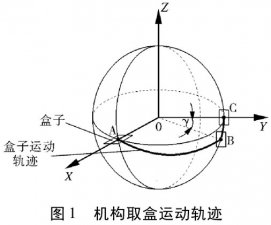
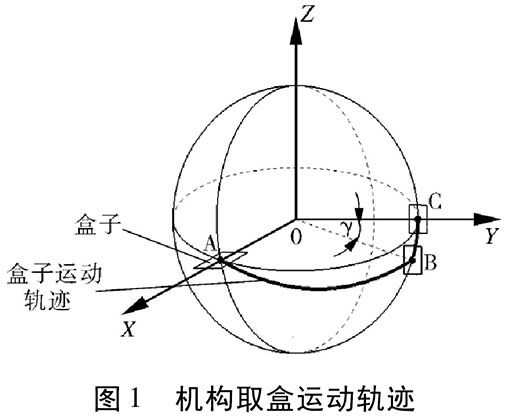
根據(jù)生產(chǎn)線的要求,運用軌跡反求法實現(xiàn)機構(gòu)要求的運動軌跡,此軌跡為A一B一C一B一A的往復運動,如圖1所示。根據(jù)此運動軌跡的特征,對此機構(gòu)進行綜合分析與設計。
首先根據(jù)此機構(gòu)的定性分析,實現(xiàn)整個運動過程需要兩個擺軸的復合擺動來控制,即此機構(gòu)的自由度為2;另外根據(jù)機械設計原理自由度的分析計算得到的結(jié)果同樣是自由度為2的機構(gòu)如圖2示出。
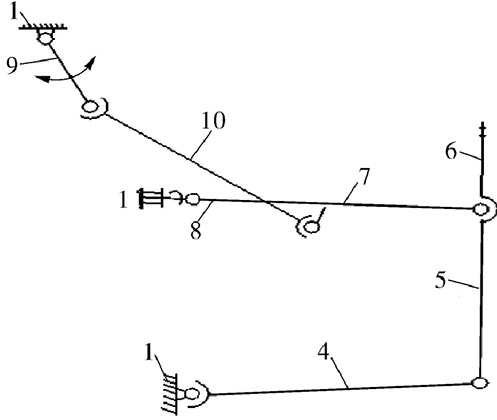
圖2空間連桿機構(gòu)簡圖
1一機架4一從動擺臂5一吸盒導桿6一吸盒吸頭7一主動擺臂8一主動往復旋轉(zhuǎn)擺軸9一曲柄搖桿10-撐桿
自吸盒開始的位置為主動往復旋轉(zhuǎn)擺軸(主擺軸)控制擺臂的空間位姿與送盒的安放位姿一致(如圖2中吸盒位置),而空間曲柄搖桿的位姿為撐桿的撐起極 限位置,此時隨著主擺軸的擺動,空間曲柄搖桿從撐桿撐起極限位置開始向內(nèi)側(cè)拉進,當主擺軸擺動到位姿(如圖2中特定位置)的時候,空間曲柄搖桿帶動撐桿擺 到拉進極限位置,至此空間曲柄搖桿拉進動作完成,此后只是主擺軸單獨再繼續(xù)擺動一個小角度至位姿(如圖3吸盒位置)處,把盒子送到所需位置,至此完成取盒 進給動作,伴隨主擺軸小角度擺動,撐桿與空間曲柄搖桿的十字連接會隨著主動擺臂作隨動球面擺動;接著主擺軸作回擺動作,過程與來時正好相反,至吸盒位置 處,到此整個吸盒動作完成。
以主動往復旋轉(zhuǎn)擺軸與主動擺臂的接點處為坐標原點建立空間直角坐標系OXYZ,平行于安裝板面為XOZ面,X方向為水平方向,Z方向為豎直方向,垂 直于安裝板面向外為Y方向;根據(jù)工程實際要求,將空間連桿機構(gòu)的動作分解為兩部分,即平面XOZ和平面YOZ上的運動,而此時的空間連桿機構(gòu)也可以轉(zhuǎn)化為 單個平面上的平面機構(gòu)來加以分析;在平面XOZ上是主動往復旋轉(zhuǎn)擺軸作一定角度的轉(zhuǎn)動,根據(jù)盒子的擺放位置與盒子到達位置的空間關系,首先確定主動擺臂的 尺寸M及吸盒導桿和從動擺臂的各自尺寸;在YOZ面上是以曲柄搖桿的擺動來實現(xiàn);要實現(xiàn)撐桿的推拉動作,只需找出撐桿的運動軌跡亦即撐桿與主動擺臂的連接 點的軌跡,接著分析撐桿的連接點位置,在空間坐標系OXYZ中任取主動擺臂上一段長為a的點(靠近坐標原點0,距離越小越利于減小撐桿的行程,但應以不能 使機構(gòu)產(chǎn)生干涉為基準),由于主動擺臂做擺動,所以其軌跡應是以0為圓心、a為半徑的一段球面弧線,要從YOZ面擺到}OZ面,根據(jù)運動過程中桿長不變規(guī) 則,要保證撐桿的位置適應要求,應該是連接點的位置到主動擺臂距離也為a。
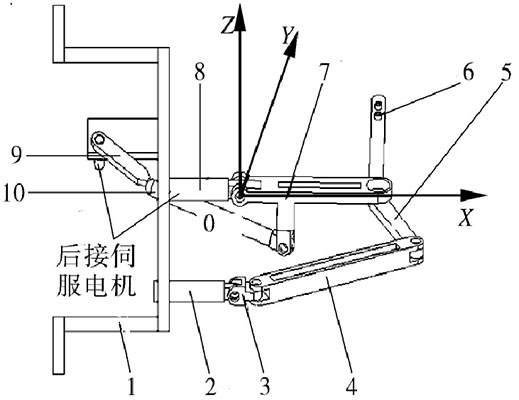
圖3吸盒位置A
1一機架2一不動軸3一十宇連接塊4一從動擺臂5一吸盒導桿6一吸盒吸頭7一主動擺臂8一主動往復旋轉(zhuǎn)擺軸9一曲柄搖桿10-撐桿
在吸盒位置時(如圖3),吸盒導桿的位置與水平面夾角為θ,連接點的坐標應為A(asinθ,acosθ,a);此時撐桿完全撐起,曲柄搖桿推到極限位置。
吸盒一送盒一放盒,送盒到放盒的過程中應避免吸盒導桿與待放盒機構(gòu)干涉,因此在送盒過程中到達放盒位置之前應該己經(jīng)到達XOZ面,如圖4為送盒過程 中剛到達XOZ平面時的位姿,此時的動作只有主擺軸帶動主動擺臂繼續(xù)擺動,而曲柄搖桿則停止擺動,搖桿拉到極限位置,但撐桿會在位置固定的球面鉸鏈下作隨 動旋轉(zhuǎn);此時盒子只在XOZ面上向上移動,此時主動擺臂位置與XOY面夾角為y,至此主擺軸旋轉(zhuǎn)過a度,所以整個取盒過程主軸旋轉(zhuǎn)的角度為a+y。
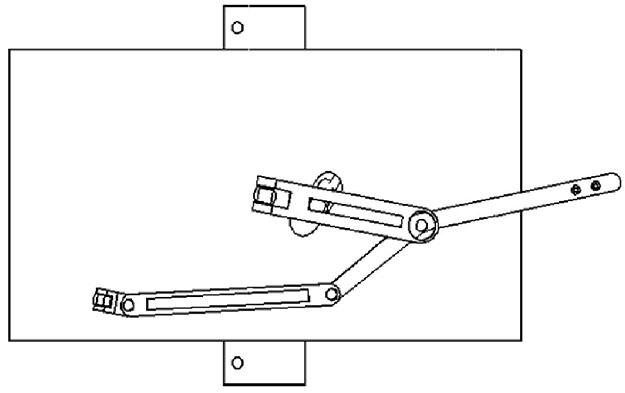
圖4送盒特定位置B
到達放盒位置時(如圖5),即主動擺臂與XOZ面平行且沿X軸方向,此時連接點的坐標為C (acosy,asiny,一a)。
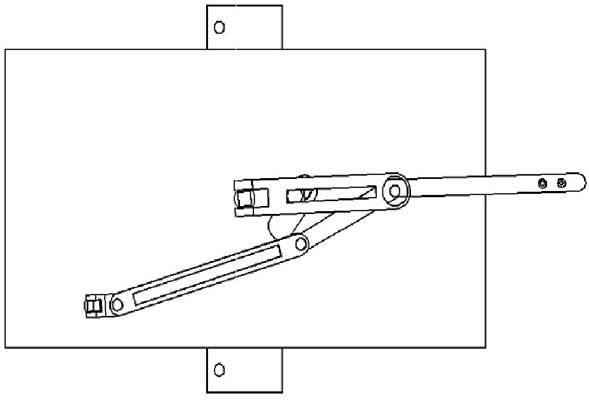
圖5放盒位置C
根據(jù)連接點在兩個動作極端位置坐標,H²=a²( sinθ一cosy)²+a²(cosθ一siny)²+4a²;可得出兩點間的弧線距離,亦即整個過程中撐桿的推拉行程L,還可算出此時主動擺臂的擺動 角度杯當主動擺臂擺恰好到平行}OZ面時,曲柄搖桿擺到拉回極限位置,此時撐桿開始以球面鉸鏈為球心做隨動擺動,直到到達待放盒位置為止;據(jù)此可判斷曲柄 搖桿的拉回極限位置的鉸鏈位置應該處在主動擺臂在YOZ面上的擺動幅度的垂直平分面上。
整個送盒過程中,主擺軸和曲柄搖桿同時運動的時間段為空間連桿從吸盒至XOZ平面位置時止,這段時間內(nèi)主動擺臂的擺動幅度亦即主動擺臂與撐桿連接點 的擺動幅度為點B到點A劃 過的弧線距離L,此段時間內(nèi)連接點的運動軌跡應該在以坐標原點為圓心a為半徑的錐面和以點B到點A的距離Lba為直徑以其中點C坐標為球心的球面的交線圓 確定的面內(nèi),據(jù)此根據(jù)空間換算可得出此面與XOY面垂直,與XOZ面的夾角為σ,亦可知撐桿在面ABC內(nèi)進行推拉動作,即曲柄搖桿在面ABC內(nèi)擺動;根據(jù) 工程設計要求,可令曲柄搖桿擺角為ω,由撐桿行程為L,搖桿的弧線擺動特性可換算出搖桿長度為L=aψ/ω;令曲柄搖桿的起始位置即處于吸盒位置時,撐桿 與曲柄處于直線位姿,曲柄搖桿的擺角可設為90“或其他任意角度(視推拉幅度而定),根據(jù)操作空間設定曲柄搖桿的安裝位置,相應地可得出對應撐桿桿長,至 此此空間連桿機構(gòu)及其控制部分曲柄搖桿機構(gòu)即可完全確定;此處僅提供此機構(gòu)部分相關數(shù)據(jù):盒子起始位姿斜度30°,y為15°,曲柄搖桿擺角ω為90°, 另外桿4和桿5之間的夾角始終大于90°。
取盒機構(gòu)己經(jīng)在某公司投產(chǎn),根據(jù)實際運行結(jié)果,得出所設計的空間連桿機構(gòu)及其控制機構(gòu)互不干涉,結(jié)構(gòu)合理,為實現(xiàn)上開蓋取盒藥品包裝機械生產(chǎn)線的高速化、重復定位精確化提供了很好的保證。